Light detection and ranging, abbreviated as lidar, is a remote sensing technology that measures three-dimensional information about forest structure and the ground surface. The lidar instrument emits laser pulses typically at a near infrared wavelength (1064 nm), and the sensor records the return signals reflected off various parts of vegetation and the ground surface. The elevation of the bare earth and vegetation are calculated based on the time for the laser pulse to reflect off an object and return to the sensor. Airborne laser scanners typically measure the elevation at a resolution of 1-30 measurements per square meter. Each point in a lidar point cloud consists of a 3D location (x, y, and z) and often attributes such as the pulse’s return number, the intensity of the return signal and the classification of the feature represented by the return. Below we review these below.
Elevation
Each point in a lidar point cloud has an elevation. This elevation represents the height above sea level and, in detail, relative to a mathematical ellipsoid or geoid. The set of points in the lidar point cloud often measures the elevation of the ground surface (called the bare earth), multiple parts of a tree (such as the lower trunk, the mid-story and the canopy), and infrastructure (such as roads and buildings).
Return number
A single emitted lidar pulse often interacts with multiple features at and near the ground surface, reflecting back and measuring their elevation and characteristics. Each laser return from a single emitted laser pulse is labeled by the return number. The first returns travel the shortest distance from the lidar instrument to the point where they reflect and travel back to the lidar sensor. These first returns measure the highest features in a landscape, often a tree canopy or building roof. The later returns often measure the sub-canopy vegetation. The last return travels the greatest distance and often measures the ground surface, except when dense vegetation or buildings obstruct the pulse from reaching the ground.
Intensity
The intensity of the return signal indicates the amount of energy reflected back from the target. Lidar lasers in the near infrared part of the electromagnetic spectrum collect information about forest health and tree type. Specifically intensity, when combined with other lidar attributes, can be used for land-cover classification. Intensity can also be used to differentiate between tree species, for example broad-leafed trees from conifers or different tree species common in a particular landscape. Despite these applications, intensity is used less frequently than other lidar attributes.
Classification
After lidar datasets are collected, each point can be assigned a classification that indicates the type of feature it represents. A common classification differentiates ground points from all other points (labeled as unclassified) and is useful for bare earth projects. More detailed classification approaches categorize points as vegetation of different sizes and buildings. Many open-source and proprietary lidar classification algorithms exist. Ground classification algorithms often work iteratively and identify low ground points based on input window sizes.
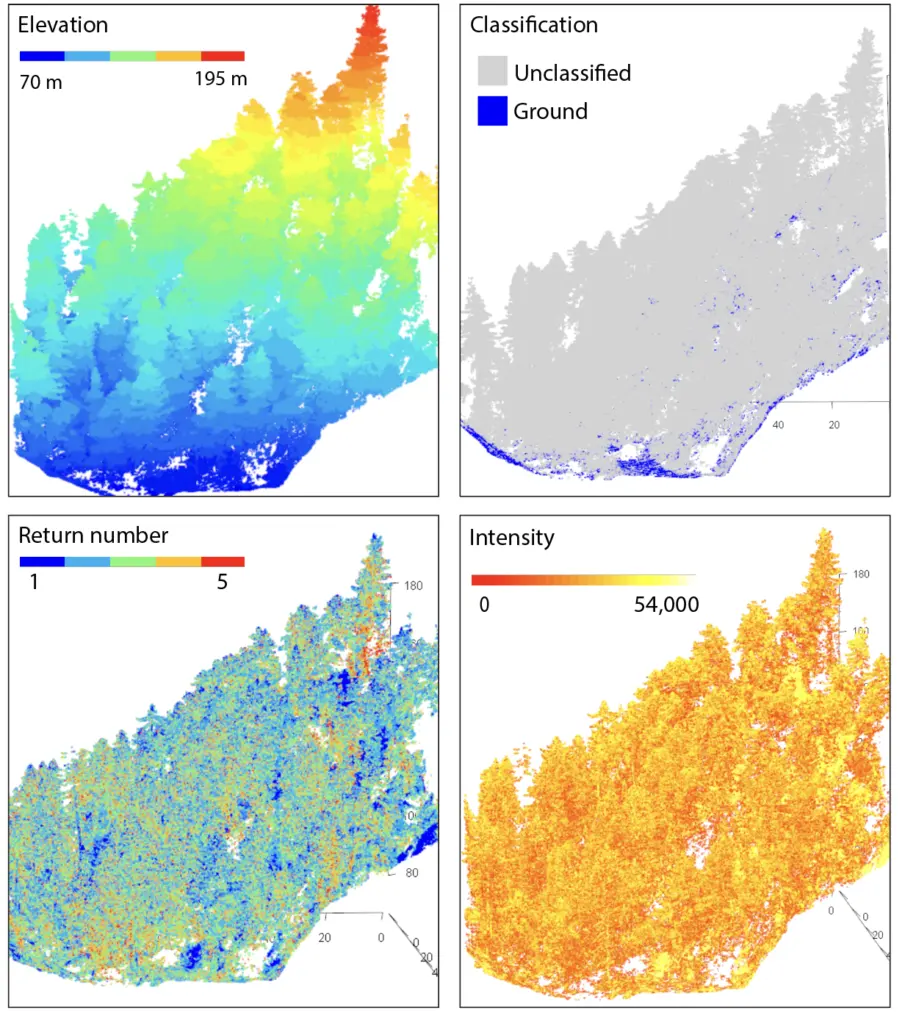
A lidar point cloud displaying elevation, classification, return number, and intensity. The point cloud collected in 2022 has a point density of 85 pt/m2. The area shown here is in central California along the Big Sur coast. Dataset reference: Olsen, T. (2023). Quantifying Channel Change in a Steep Coastal Stream, CA 2022. National Center for Airborne Laser Mapping (NCALM). Distributed by OpenTopography. https://doi.org/10.5069/G9TD9VJF.