Lidar point cloud data is valuable for mapping tree locations and analyzing the geometric structure of forests. The number, spatial distribution, and height of trees are important for understanding ecosystems, calculating biomass, and planning sustainable logging activities. Our analysis focuses on Sunset Crater near Flagstaff in northern Arizona. Sunset Crater is a cinder cone volcano at an elevation of approximately 2,100 meters (7,000 feet) that erupted approximately 1000 years ago. Ponderosa pines, junipers, and rabbitbrush grow along the volcanic field. Vegetation height varies, often with spacing between the taller ponderosa pine trees.

A photograph of the vegetation surrounding Sunset Crater in northern Arizona.
Tree Identification:
LidR (Roussel et al., 2020) is a powerful software package for measuring forest and vegetation characteristics from lidar point cloud data. In lidR, trees can be identified and distinguished from adjacent trees using a local maximum filter. Local maximum filters work by identifying local maxima within a window of a specified dimension. These local maxima are the location of tree tops.
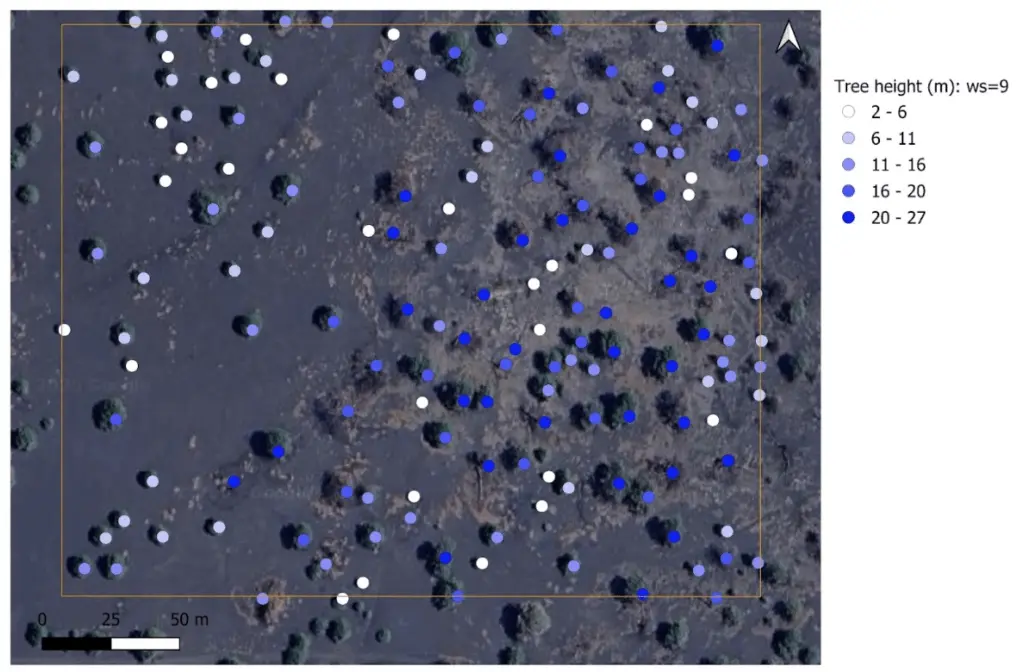
Tree location and height estimated from lidar data using a 9-meter window size in LidR.
In the image above, tree locations are indicated with a dot, and the dot color indicates the tree height. The tree locations are measured with a 9-meter window size, reflecting that the algorithm used a 4.5-meter radius circle to identify the local height maxima corresponding to the tree top. At this scale, the tree identification looks correct— trees are labeled at their correct location, and wider trees are typically taller.
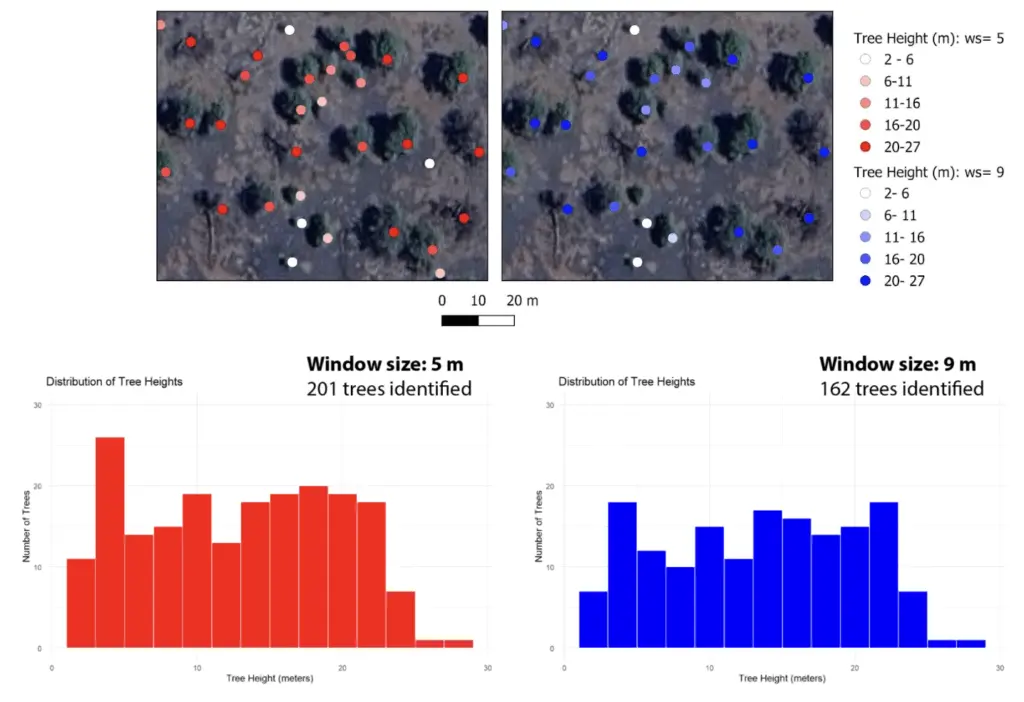
Map of location and height of trees and tree height histogram estimated with a 5-meter (left, red) and a 9-meter (right, blue) window size.
The window size used to identify trees influences the count and height of the identified trees. The left map above was generated using a 5-meter window size, and the right map with a 9-meter window size. The 5-meter window size detects more trees as the algorithm is sensitive to smaller and closer together trees. In contrast, the 9-meter window size identifies larger trees and is relatively likely to miss smaller or adjacent trees. This difference in tree identification is also shown in the tree-height histogram: the 5-meter window size detects more trees, particularly at heights less than 4 meters. For larger tree heights, the impact of the window size decreases.
In summary, the choice of window size affects the level of detail captured in the tree detection process across the landscape.
Tree segmentation and crown delineation:
Tree segmentation algorithms identify individual trees from lidar and assign each vegetation data point to a specific tree. Geometric parameters, such as maximum and mean tree height and crown diameter can be estimated from segmented trees. Li et al. (2012)’s algorithm implemented in lidR segments trees based on the normalized point cloud by identifying the tops of trees and assuming that tree width grows towards the ground. Segmenting trees near the ground becomes increasingly challenging when trees are adjacent to each other. The algorithm segments trees from top to bottom and assigns the lower tree to the relevant tree cluster using a spacing parameter.
The plot below shows the tree segmentation of the normalized point cloud at Sunset Crater, where each color indicates an individual tree. The tree height and density vary, consistent with the plots above. The bottom plot shows the trees’ convex hulls, which are colored by area. Notably, the convex hulls often extend beyond the visible tree boundary.
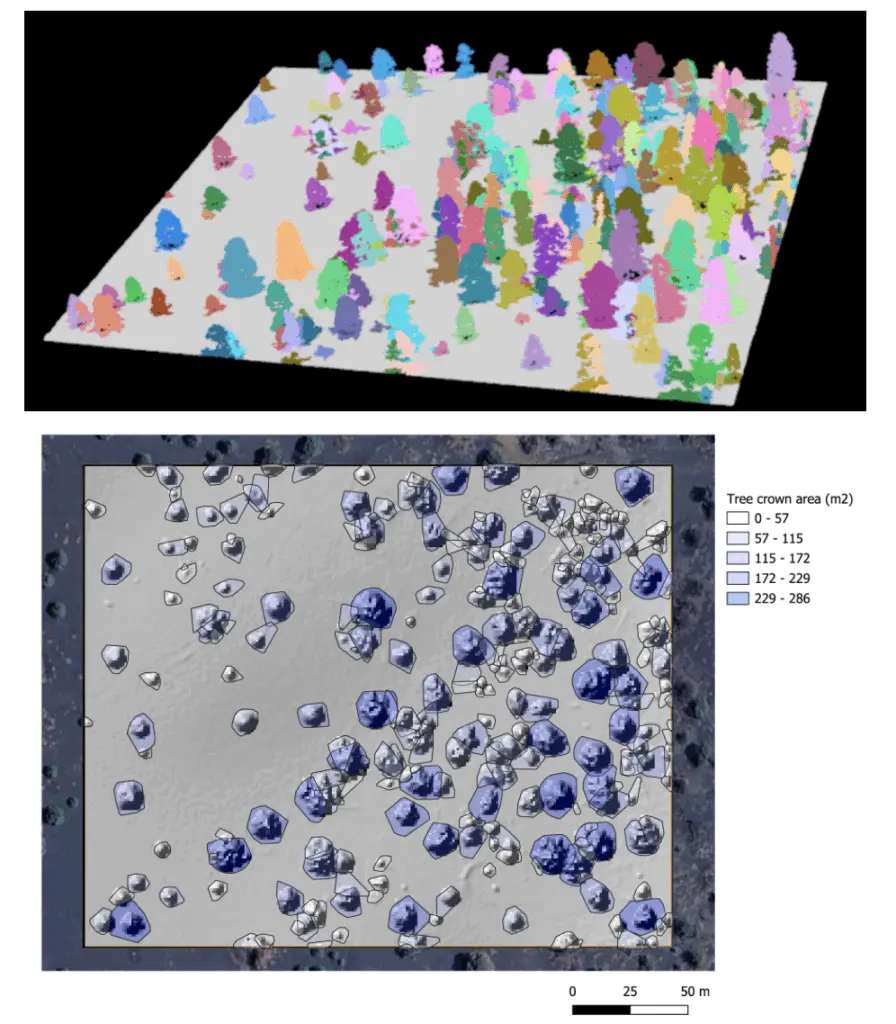
(Top) Tree segmentation performed on the normalized point cloud data using the Li et al. (2012) algorithm. (Bottom) Convex hull colored by area in square meters plotted on a topographic hillshade.
References:
Li, W., Guo, Q., Jakubowski, M. K., & Kelly, M. (2012). A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogrammetric Engineering & Remote Sensing, 78(1), 75–84. https://doi.org/10.14358/PERS.78.1.75
Roussel, J.-R., Auty, D., Coops, N. C., Tompalski, P., Goodbody, T. R. H., Meador, A. S., et al. (2020). lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sensing of Environment, 251, 112061. https://doi.org/10.1016/j.rse.2020.112061
Sunset Crater Volcano National Monument, AZ. Distributed by OpenTopography. https://doi.org/10.5069/G9K0726C.