OpenForest4D science gateway lets researchers analyze data and use computing resources online without downloads, local hardware, or software setup, enabling accessible, collaborative, and reproducible science.
The OpenForest4D USGS 3D Elevation Profile Forest Structure Metrics workflow enables on-demand generation of grid-level (e.g. digital surface models, canopy height models) and forest canopy metrics from Airborne Lidar Scanning data from USGS 3D Elevation Program (https://www.usgs.gov/3d-elevation-program).
The workflow provides federated access to USGS 3DEP data via public access organization provided in Entwine Point Tiles format, a lossless, full-density, streamable octree based on LASzip (LAZ) encoding. More information about this open dataset can be found at https://registry.opendata.aws/usgs-lidar/
Step 0. Login to OpenForest4D using CILogon
CILogon is an identity and access management platform. It provides federated authentication, so users can access cyberinfrastructure platforms like OpenForest4D with their home organization’s credentials (such as university logins, Google, Microsoft, GitHub, and ORCID), avoiding the need to manage separate usernames and passwords for each service.
Step 1. Select the spatial area of interest / USGS 3DEP dataset on the map interface.
The map interface shows spatial extents of the USGS 3DEP data collections. Zoom in until the “Select a region” button functionality gets enabled (turns blue) and select a spatial region of interest.
Currently spatial selection areas are limited to 20 million lidar returns per job. This is to ensure equitable access to all users and manage system resources more efficiently.
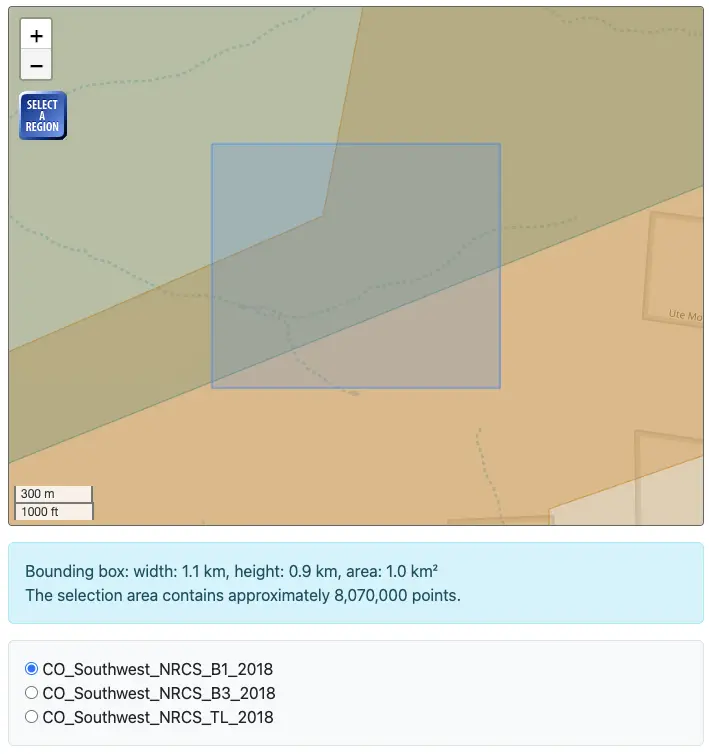
If there are multiple datasets in the spatial selection area, users will be provided with the option to choose a dataset.
The workflow will then extract and download the USGS 3DEP point cloud data in the selected area as a point cloud file in the LASzip (LAZ) format.
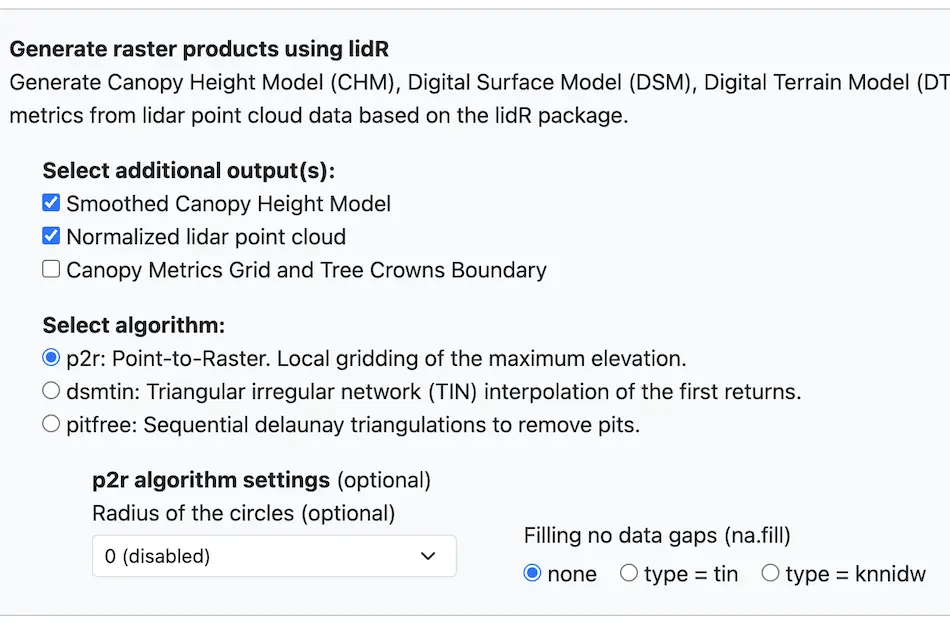
Step 2: Generate raster products based on the lidR package
This step processes the downloaded lidar point cloud data using the lidR package to generate essential forestry and ecology products. More information about lidR is at https://r-lidar.github.io/lidRbook/
lidR algorithm options
- p2r: Point-to-Raster. Local gridding of the maximum elevation.
This function implements an algorithm for digital surface model computation based on a points-to-raster method: for each pixel of the output raster the function attributes the height of the highest point found. The subcircle tweak replaces each point with 8 points around the original one. This allows for virtual “emulation” of the fact that a lidar point is not a point as such, but more realistically a disc. This tweak densifies the point cloud and the resulting canopy model is smoother and contains fewer “pits” and empty pixels.
Optional arguments:
– Radius of the circle (subcircle) – To obtain fewer empty pixels the algorithm can replace each return with a circle composed of 8 points
– Filling no data gaps (na.fill) – A function that implements an algorithm to compute spatial interpolation to fill the empty pixel often left by points-to-raster methods.
- dsmtin: Triangular irregular network (TIN) interpolation of the first returns.
This function implements an algorithm for digital surface model computation using a Delaunay triangulation of first returns with a linear interpolation within each triangle. - pitfree: Sequential delaunay triangulations to remove pits.
This function implements the pit-free algorithm developed by Khosravipour et al. (2014), which is based on the computation of a set of classical triangulations at different heights. The subcircle tweak replaces each point with 8 points around the original one. This allows for virtual “emulation” of the fact that a lidar point is not a point as such, but more realistically a disc. This tweak densifies the point cloud and the resulting canopy model is smoother and contains fewer ‘pits’ and empty pixels.
Optional Arguments:
– Classical triangulation value, (max_edge) – is the value for the classical triangulation. If max_edge = 0 no trimming is done
-Pit-free algorithm value – value for the pit-free algorithm (for thresholds > 0).
– Radius of the circles (subcircle) – To obtain fewer empty pixels the algorithm can replace each return with a circle composed of 8 points
Khosravipour, A., Skidmore, A. K., Isenburg, M., Wang, T., & Hussin, Y. A. (2014). Generating pit-free canopy height models from airborne lidar. Photogrammetric Engineering & Remote Sensing, 80(9), 863-872.Additional Products:

Forest Canopy Gap Detection from CHM
This function reads the canopy height model (CHM) data, detects forest canopy gaps based on a height threshold and area limits, computes per-gap statistics, converts them to polygons with centroids, and visualizes the gaps in the forest canopy.
Step 3: Job Submission
Submit the job once you have chosen the spatial area of interest, selected the desired processing algorithm, and configured its parameters. The job will execute on cloud-based computing resources, and the resulting products will be generated automatically. You can view the output and access records of previous submissions through the myJobs interface of the application.
Products Generated by the workflow
The OpenForest4D USGS 3D Elevation Profile Forest Structure Metrics workflow generates multiple products including –
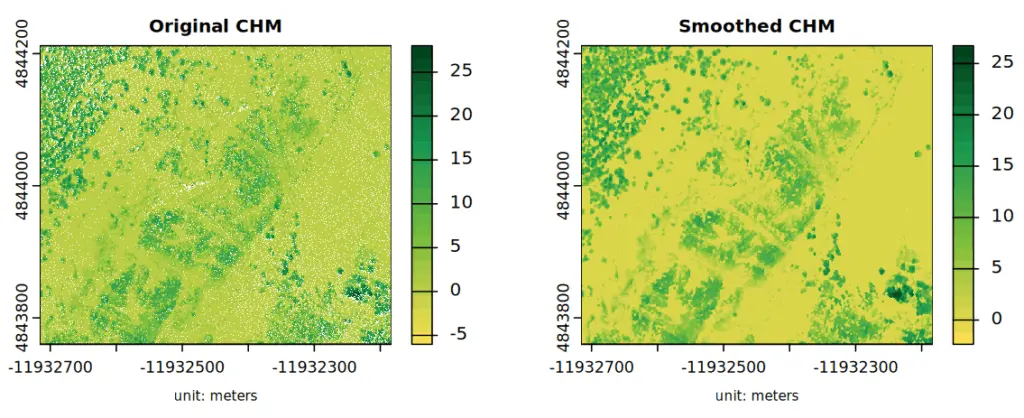
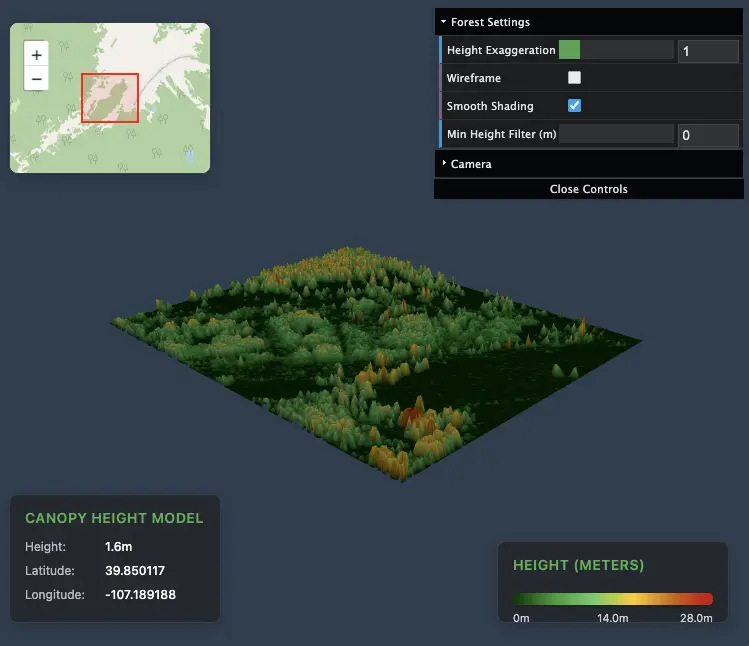
- Canopy Height Model (CHM)
- CHM Smoothed
- Digital Surface Model (DSM)
- Digital Terrain Model (DTM)
- Normalized point cloud
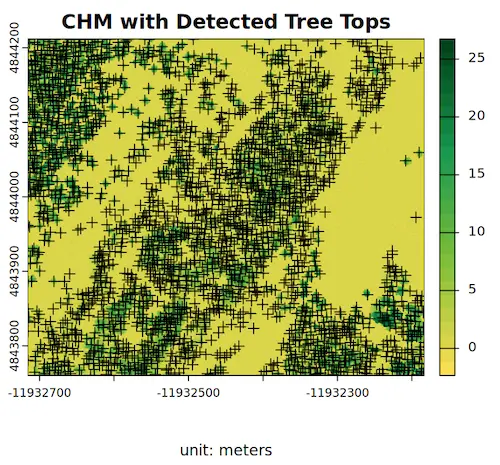
- Tree Crowns Boundary
- Canopy Metrics Grid
- Visualizations
- DSM/DTM Hillshade
- 3D visualizations of CHM, DSM, DTM
- Forest Canopy Gaps
Data Usage and License
All datasets are in the public domain per USGS policy and may be used without restriction for research, education, or commercial purposes.
When using the products generated from the OpenForest4D USGS 3D Elevation Profile Forest Structure Metrics workflow in publications and reports, please cite OpenForest4D. E.g.
U.S. Geological Survey (2021). USGS_LPC_CO_Central_Western_2016_LAS_2018. Processed via NSF OpenForest4D. Accessed 2025-10-27
Use License: US Government Public DomainCitation language is also provided on results pages for convenience.
Access the OpenForest4D USGS 3D Elevation Profile Forest Structure Metrics
workflow here.
For any questions please email info@openforest4d.org